





















Tous les produits
-
Vision nocturne infrarouge multifonctionnelle portative
-
Robot de déminage de munitions explosives
-
Robot de reconnaissance miniature
-
Vision numérique de nuit monoculaire
-
Dispositif numérique de vision nocturne
-
Anti-Sniper
-
Radar portable
-
Une lampe de poche pour enregistrer une patrouille
-
Équipement tactique pour les opérations spéciales
-
Portée de fusil
-
Télémètre de laser
-
Modèle militaire
-
équipement tactique
-
Des appâts gonflables
Robot de déminage électronique compact multifonctionnel pour l'élimination des bombes







| Lieu d'origine | Chine |
|---|---|
| Nom de marque | Particle |
| Numéro de modèle | RÉOD400 |
| Prix | $17,000 |

Contactez-moi pour des aperçus gratuits et des bons.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Si vous avez n'importe quel souci, nous fournissons l'aide en ligne de 24 heures.
xDétails sur le produit
| Vision nocturne | Oui | Résolution | Haut |
|---|---|---|---|
| Fonction | Multifonctionnel | Vision | Vision nocturne |
| Durabilité | Durable | Poids | ≤ 37 kg ((Contient deux ensembles de piles) |
| Temps de travail (température ambiante) | ≥2H | Température de fonctionnement | -40℃~+50℃ |
| Catégorie IP | IP66 | Taille | ≤ 830 mm × 600 mm × 460 mm ((Totellement rangé) |
| La capacité à surmonter les obstacles | ≥300mm | Gradabilité | ≥45° |
| Les articulations mobiles | 8 | Largeur d'ouverture maximale de la pince | ≥160mm |
| Méthode de fonctionnement | Fonctionnement en double mode du bouton et de l'écran tactile | Durée de vie de la batterie (température normale) | ≥2H |
| Largeur de la rainure | ≥400MM | Montez les escaliers | ≥45° |
| Distance de prise la plus longue | ≥ 1650 mm | Capacité de levage | 6 à 16 kg |
| Méthode de contrôle | Contrôle par câble ≥ 100 m ((cable standard),contrôle sans fil ≥ 1000 m ((extérieur) | ||
| Mettre en évidence | Verres de vision nocturne infrarouge multifonctionnels,lunettes de vision nocturne infrarouges haute résolution,Des lunettes d'imagerie thermique portatives |
||
Description de produit
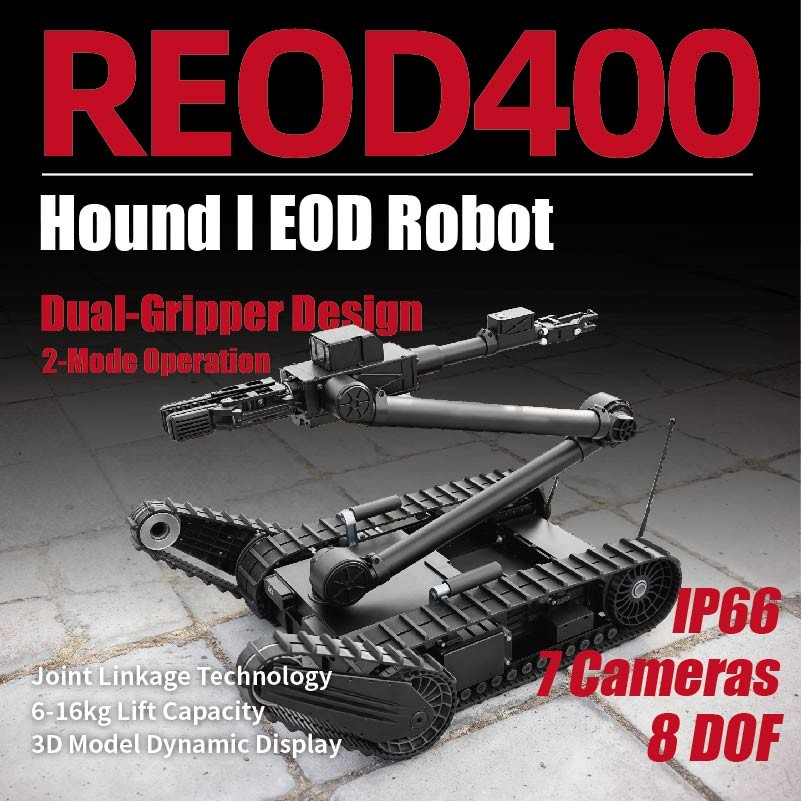
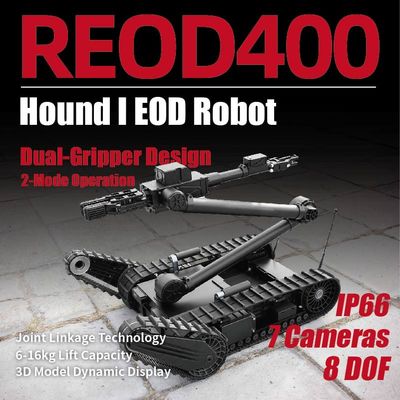
Robot de déminage léger EOD Hound-I
Description et caractéristiques
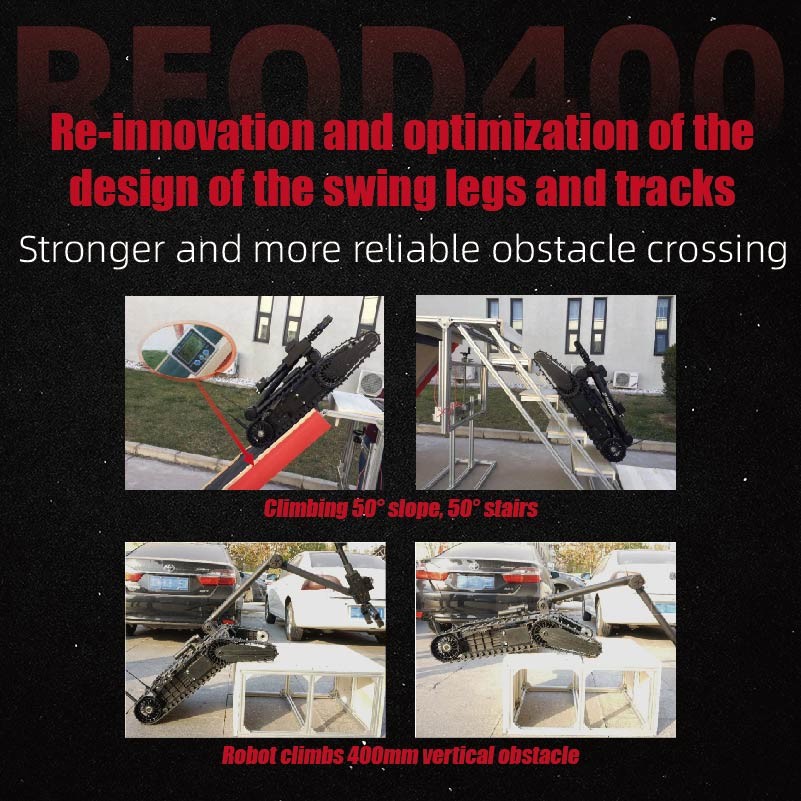
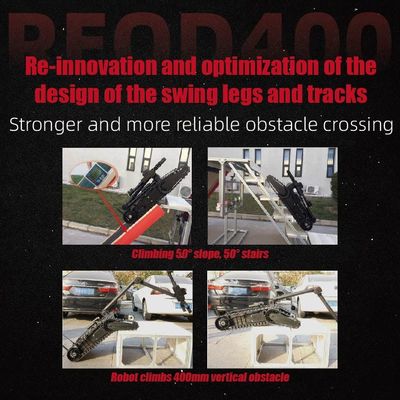
Le robot EOD REOD400 est une solution avancée pour la neutralisation des engins explosifs (EOD) dans des environnements à haut risque. Doté d'une conception unique à "deux pinces", il peut effectuer simultanément diverses tâches, ce qui le rend très efficace pour des opérations telles que la lutte contre le terrorisme urbain, la sécurité publique, les secours en cas de tremblement de terre et la neutralisation des bombes. Le robot est compact et léger, avec des dimensions de ≤830 mm × 600 mm × 460 mm (entièrement rangé) et un poids de ≤37 kg. Il a une vitesse maximale de ≥1,8 m/s avec 5 vitesses et une transmission à variation continue, un franchissement d'obstacles de ≥300 mm, et une capacité de franchissement de pentes et de montée d'escaliers allant jusqu'à 45°, assurant une maniabilité et une adaptabilité supérieures sur divers terrains.
Équipé d'un manipulateurà 8 degrés de liberté, le REOD400 offre un contrôle précis avec une hauteur de préhension maximale de ≥1700 mm (griffe principale) et une distance de préhension la plus éloignée de ≥1380 mm (griffe principale). Le robot prend en charge un affichage vidéo à 7 canaux, permettant des perspectives d'observation plus riches, et dispose de capacités d'affichage en temps réel de la posture 3D à distance. Avec une autonomie de batterie de ≥2 heures à température normale, un indice de protection IP66 pour la résistance à la poussière et à l'eau, et des méthodes de contrôle qui incluent le contrôle par câble jusqu'à 100 m et le contrôle sans fil jusqu'à 1000 m, le REOD400 est conçu pour la fiabilité et la polyvalence dans des conditions difficiles. De plus, il propose des options de personnalisation OEM et ODM pour répondre aux besoins opérationnels spécifiques.
Conception innovante "Double pince" — Améliorer la flexibilité et la faisabilité dans l'exécution des tâches
La conception innovante "Double pince" comprend un bras robotique équipé à la fois d'une "griffe de préhension principale" et d'une "griffe d'extension multifonctionnelle". Cette conception améliore considérablement la flexibilité et la faisabilité du robot dans l'exécution des tâches, offrant un soutien efficace pour l'accomplissement d'une variété de tâches en une seule opération. La conception "Double pince" répond efficacement aux limites des robots de déminage traditionnels qui n'ont qu'une "seule pince", qui ne peuvent pas effectuer simultanément des tâches telles que "saisir des objets dangereux" et "ouvrir des portes, couper, serrer, sectionner, accrocher et autres actions auxiliaires". Par exemple, il peut effectuer des tâches telles que "ouvrir une porte et saisir un objet en une seule fois."
La conception "Double pince" libère avec succès la "griffe de préhension principale" de la nécessité d'effectuer des fonctions autres que la préhension, améliorant ainsi considérablement les capacités de préhension du robot. La pince principale peut saisir des objets dangereux suspects pesant 6 à 16 kg, avec une largeur de préhension allant jusqu'à 160 mm et une force de serrage maximale de 300 N. De plus, en fonction des tâches opérationnelles spécifiques, l'"ensemble d'outils de préhension" peut être rapidement remplacé pour manipuler différents types et formes d'objets dangereux.
Prise en charge du contrôle tactile / joystick — Interaction plus conviviale et fonctionnement fiable
La conception de l'opération de contrôle tactile / joystick graphique est actuellement une solution de contrôle de robot de déminage de pointe au niveau international. Elle a été hautement reconnue par les utilisateurs pour son interaction plus conviviale et son fonctionnement fiable. Ses principales caractéristiques sont les suivantes :
- Conception d'opération graphique : Toutes les opérations sont conçues de manière graphique, éliminant la nécessité pour les utilisateurs de mémoriser des fonctions de boutons et des protocoles d'exploitation complexes. Cette interface conviviale rend l'opération simple et intuitive, réduisant considérablement le temps de formation.
- Conception d'opération de contrôle tactile / joystick : Les boutons du joystick et un écran tactile peuvent être utilisés pour effectuer toutes les opérations du robot. La redondance fournie par ces deux méthodes d'exploitation améliore non seulement la fiabilité du système, mais améliore également l'efficacité opérationnelle en combinant les boutons du joystick avec les commandes de l'écran tactile.
|
|
Affichage 3D en temps réel à distance — À portée de main, fonctionnement plus intuitif
Étant donné que les robots de déminage opèrent souvent hors de la ligne de mire pendant les missions, les informations en temps réel sur les angles et les positions spatiales des articulations du robot sont cruciales pour les opérateurs. Le REOD400 utilise des liaisons à grande vitesse et une technologie informatique avancée pour non seulement obtenir un retour d'information en temps réel sur les informations d'état du robot, mais aussi pour employer une technologie d'affichage virtuel 3D de pointe pour l'affichage en temps réel à distance de l'état 3D du robot. Cela donne au robot l'impression d'être "à portée de main" même lorsqu'il est "loin", ce qui permet un fonctionnement plus intuitif.
Les principales caractéristiques de l'affichage 3D en temps réel à distance sont les suivantes :
- Affichage en temps réel de l'état 3D du robot
- Observation de l'état 3D du robot sous différents angles
- Zoom avant et arrière sur l'état 3D du robot
La manette du robot reproduit l'état 3D à distance du robot, permettant de zoomer, de dézoomer et d'observer le modèle 3D sous n'importe quel angle.
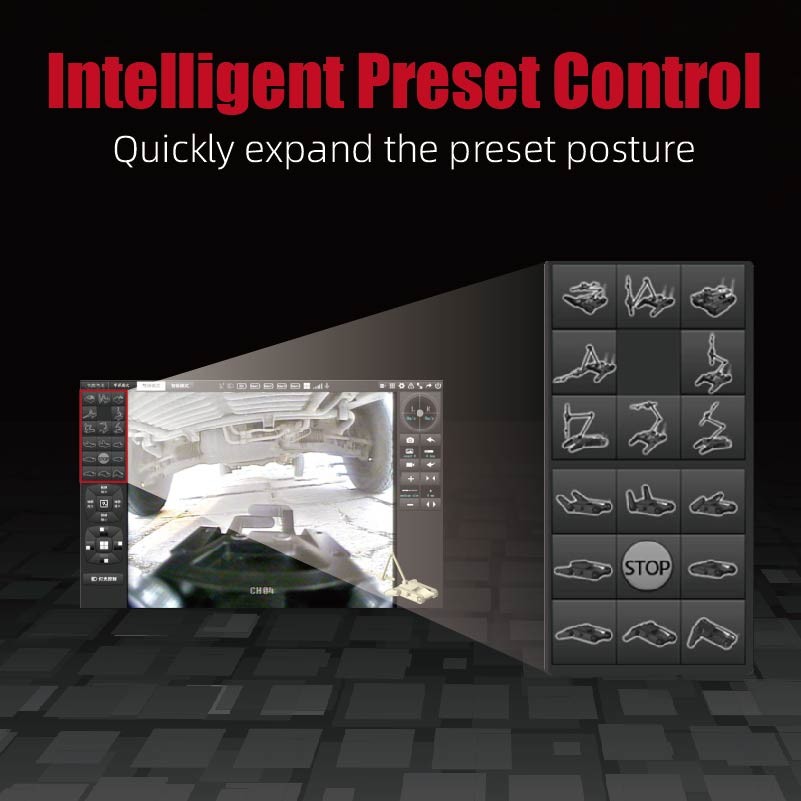
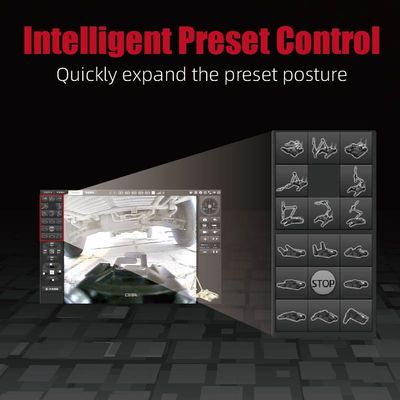
Conception de contrôle de posture prédéfinie intelligente — Opération plus simple et plus rapide
Avec le "Contrôle de posture prédéfini intelligent pour les tâches courantes", le robot peut "atteindre automatiquement une position prédéfinie en un seul clic" en fonction des besoins de l'utilisateur. Cette fonctionnalité réduit considérablement la quantité d'opérations manuelles requises sur site, servant d'assistant efficace pour les opérateurs de première ligne et améliorant la fiabilité et la sécurité des tâches de déminage.
Technologie de liaison articulaire "X-Y-Z" — Contrôle plus précis et efficace
La conception d'opération de la technologie de liaison articulaire “X-Y-Z” basée sur le calcul automatique, également connue sous le nom de "conception de contrôle de translation de la pince basée sur les coordonnées cartésiennes", transforme le contrôle "mono-articulaire" traditionnel des robots de déminage en un contrôle "multi-articulaire coordonné". Cela améliore considérablement l'efficacité opérationnelle et la précision des robots de déminage. Par rapport à la conception de contrôle "mono-articulaire", elle réduit le temps d'opération moyen de 80 %.
Le REOD400 réalise le "contrôle de translation de la pince basé sur les coordonnées cartésiennes" grâce au calcul automatique. Pour saisir des objets dangereux suspects dans un espace unidimensionnel horizontal, il contrôle rapidement le robot pour réaliser un "mouvement coordonné multi-articulaire" pour la translation de la pince dans l'espace unidimensionnel. Cela réduit considérablement la difficulté opérationnelle et augmente la précision, permettant un positionnement presque immédiat sans avoir besoin d'itérations répétées.
Système d'imagerie adaptatif au mode — Sept vues de caméra pour une observation améliorée
Le système d'imagerie du robot agit comme les yeux de l'opérateur. Le REOD400 est doté d'une conception de système d'imagerie adaptatif au mode innovante avec un système à 7 caméras, améliorant considérablement la capacité des opérateurs de première ligne à percevoir les environnements distants. La conception du système à 7 caméras n'est pas une simple disposition, mais plutôt une amélioration et une optimisation basées sur les problèmes rencontrés par les utilisateurs lors de l'utilisation réelle.
Le système d'imagerie est généralement divisé en trois combinaisons d'images : mode conduite, mode pince principale et mode pince étendue. Il bascule automatiquement entre ces modes en fonction des tâches typiques telles que la conduite, la préhension et l'observation, offrant une conscience environnementale à distance plus forte et une gamme plus riche d'angles d'observation.
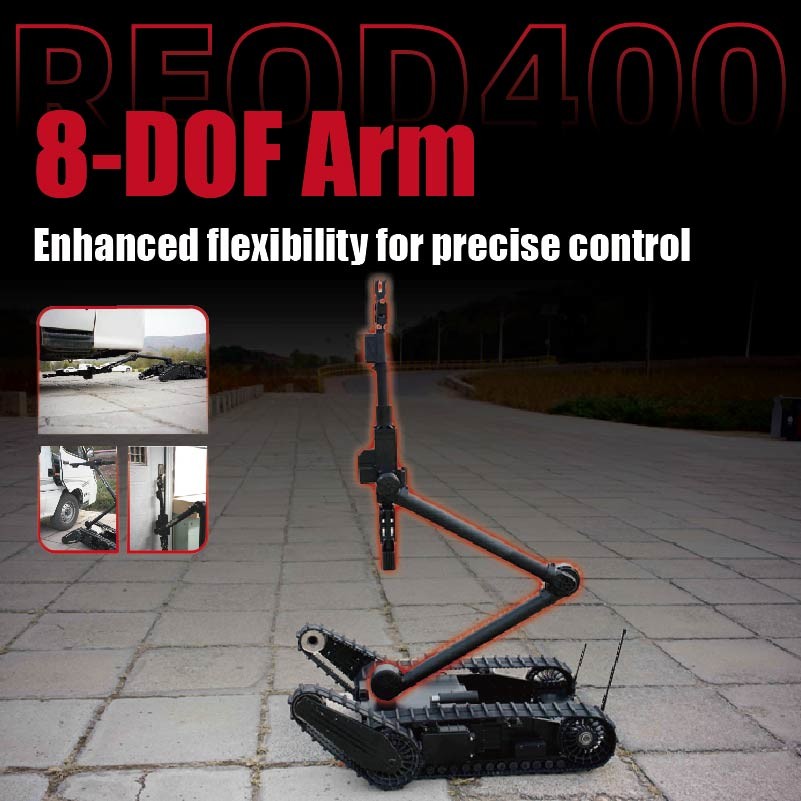
Conception de bras robotique intégré à huit degrés de liberté — Contrôle plus flexible et plus sûr
Le bras robotique REOD400 est doté d'une conception intégrée à 8 degrés de liberté, offrant de fortes capacités de portée spatiale. Cette conception permet au bras robotique d'effectuer non seulement des tâches de déminage conventionnelles, mais aussi des opérations que les robots de déminage conventionnels à 5 ou 6 degrés de liberté ne peuvent pas gérer, telles que la saisie d'objets dans des environnements hauts, bas, en fosse profonde ou sur table, ainsi que la réalisation de reconnaissances multi-angles dans des environnements hauts, bas et en fosse profonde.
Système d'outils à changement rapide polyvalent
Le robot REOD400 est équipé de 18 types d'"outils à changement rapide", dont 6 ensembles d'outils de préhension, 6 ensembles d'outils de base et 6 ensembles d'outils étendus, permettant le remplacement rapide des "ensembles d'outils de préhension" en fonction des différentes tâches opérationnelles et des types et formes de divers objets dangereux, répondant ainsi aux divers besoins opérationnels des utilisateurs.
Applications
Galerie d'images
Paramètres techniques
| Plateforme robotique | |
| Taille | ≤830×600×460mm (entièrement rangé) |
| Poids | ≤37kg (Contient deux jeux de batteries) |
| Vitesse maximale | ≥ 1,8 m/s (5 vitesses, à variation continue) |
| Capacité de franchissement d'obstacles | ≥ 300mm |
| Largeur de rainure traversée | ≥ 400mm |
| Capacité de franchissement de pentes | ≥45° |
| Montée d'escaliers | ≥45° |
| Autonomie de la batterie (température normale) | ≥2h |
| Indice IP | IP66 |
| Performance de préhension du bras robotique | |
| État étendu | ≥6kg |
| État rétracté | ≥16kg |
| Pinces | 2 |
| Articulations mobiles | 8 |
| Hauteur d'observation maximale | ≥2400mm |
| Hauteur de préhension maximale | ≥1700mm(Pince principale),≥2000mm(Pince secondaire) |
| Distance de préhension la plus éloignée | ≥1380mm(Pince principale),≥1650mm(Pince secondaire) |
| Largeur d'ouverture maximale de la pince | ≥160mm |
| Contrôleur portable | |
| Taille | ≤360×210×70mm |
| Poids | ≤2kg (Sans sac à dos) |
| Écran d'affichage | LCD 10,1'' |
| Affichage vidéo | 7 canaux |
| Méthode d'opération | Fonctionnement en mode double bouton bascule et écran tactile |
| Méthode de contrôle | Contrôle par câble ≥100m (câble standard), contrôle sans fil ≥1000m (extérieur) |
Contactez-nous
Mme Amy
whatsapp : +86 13621280280
produits recommandés