





















Tous les produits
-
Vision nocturne infrarouge multifonctionnelle portative
-
Robot de déminage de munitions explosives
-
Robot de reconnaissance miniature
-
Vision numérique de nuit monoculaire
-
Dispositif numérique de vision nocturne
-
Anti-Sniper
-
Radar portable
-
Une lampe de poche pour enregistrer une patrouille
-
Équipement tactique pour les opérations spéciales
-
Portée de fusil
-
Télémètre de laser
-
Modèle militaire
-
équipement tactique
-
Des appâts gonflables
X-Y-Z bras robotique coordonné robot EOD de taille moyenne








| Lieu d'origine | Chine |
|---|---|
| Nom de marque | Particle |
| Numéro de modèle | Résultats de l'analyse |
| Quantité de commande min | 1 |
| Prix | $205,761 |
| Conditions de paiement | T/T |

Contactez-moi pour des aperçus gratuits et des bons.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Si vous avez n'importe quel souci, nous fournissons l'aide en ligne de 24 heures.
xDétails sur le produit
| Vitesse maximale | Le système de freinage doit être équipé d'un dispositif de freinage de freinage de type V. | Caractéristiques particulières | Résistant à l'explosion, à l'eau et à la désarmement à distance |
|---|---|---|---|
| Nom du produit | Objectifs de la mission Robot de détection d'explosifs Hound-III pour les mesures d'élimination et l | Caractéristiques | 1. conception de bras mécanique de haute résistance, confère des performances de saisie puissantes;2 |
| Poids de la plateforme robot | ≤ 350 kg ((Contient des piles); | Profondeur de mise en place de la plateforme robotisée | ≥ 500 mm; |
| Applications | Comment réagir aux engins explosifs improvisés | Taille de la plateforme du robot | 1600×850×1300 mm (tous emballés); |
| Taille de robot | ≤ 950×650×650 mm ((Totellement rangé) | Poids du robot | ≤ 50 kg ((Contient deux ensembles de piles) |
| La capacité à surmonter les obstacles | ≥400MM | Largeur de la rainure | ≥400MM |
| Gradibilité | ≥45° | Montez les escaliers | ≥45° |
| Profondeur de mise en mer | ≥200mm | Durée de vie de la batterie (température normale) | ≥3h |
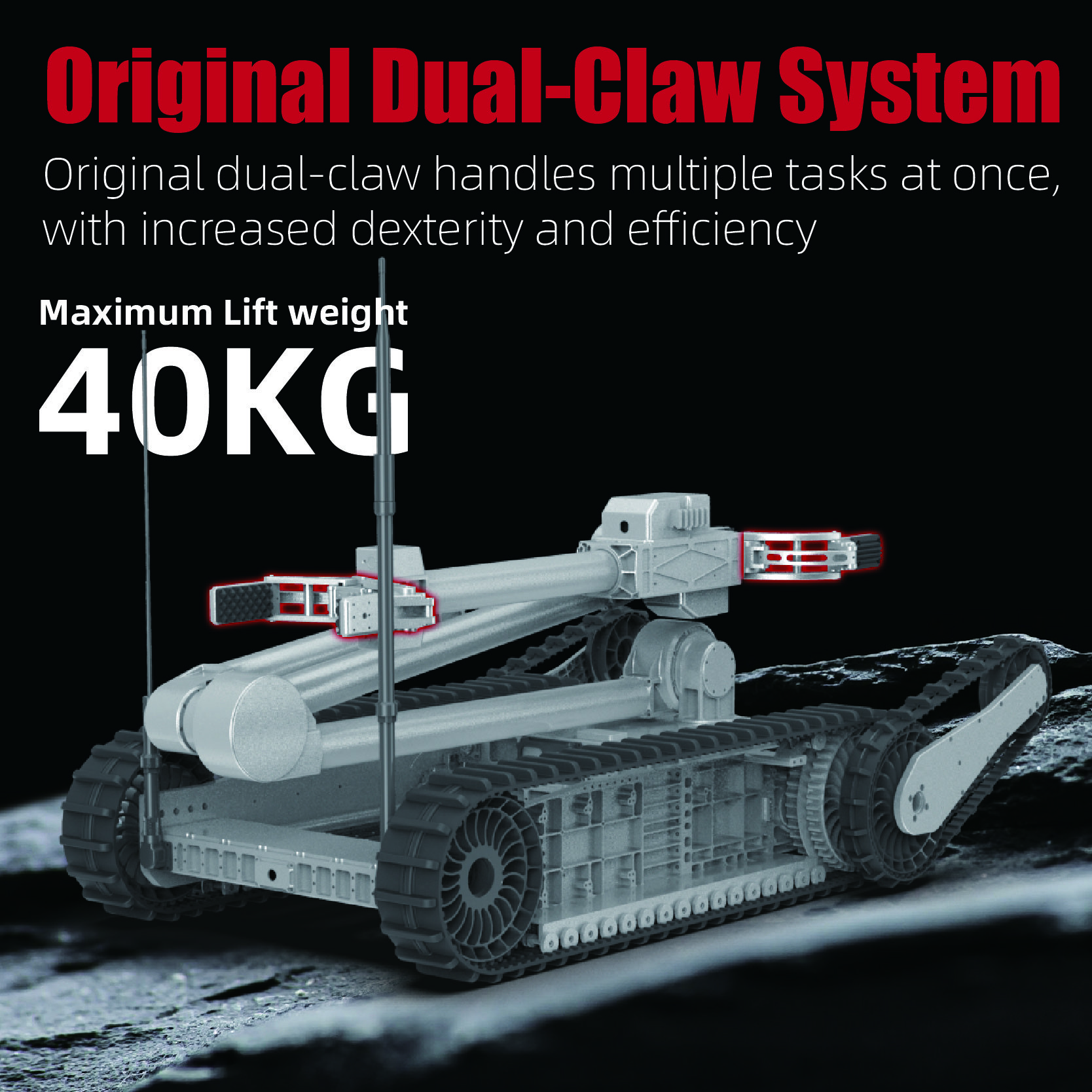
| Longueur du bras | 2 000 mm | Poids maximal de l'enlèvement | ≥ 40 kg |
| Griffes | 2 | Les articulations mobiles | 8 |
| Taille de contrôleur | ≤ 270 mm × 170 mm × 100 mm | Poids de contrôleur | ≤ 1,2 kg ((sans sac à dos) |
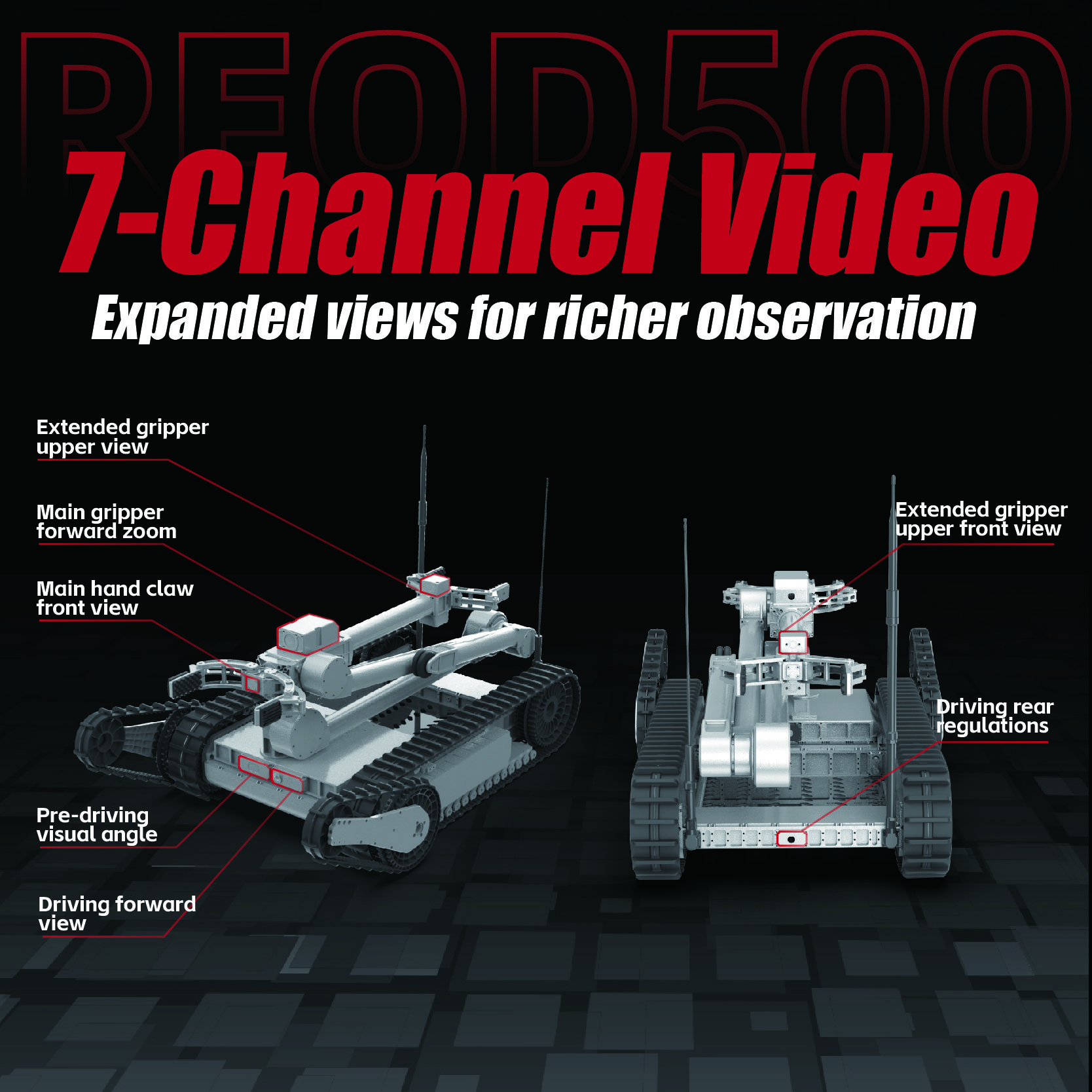
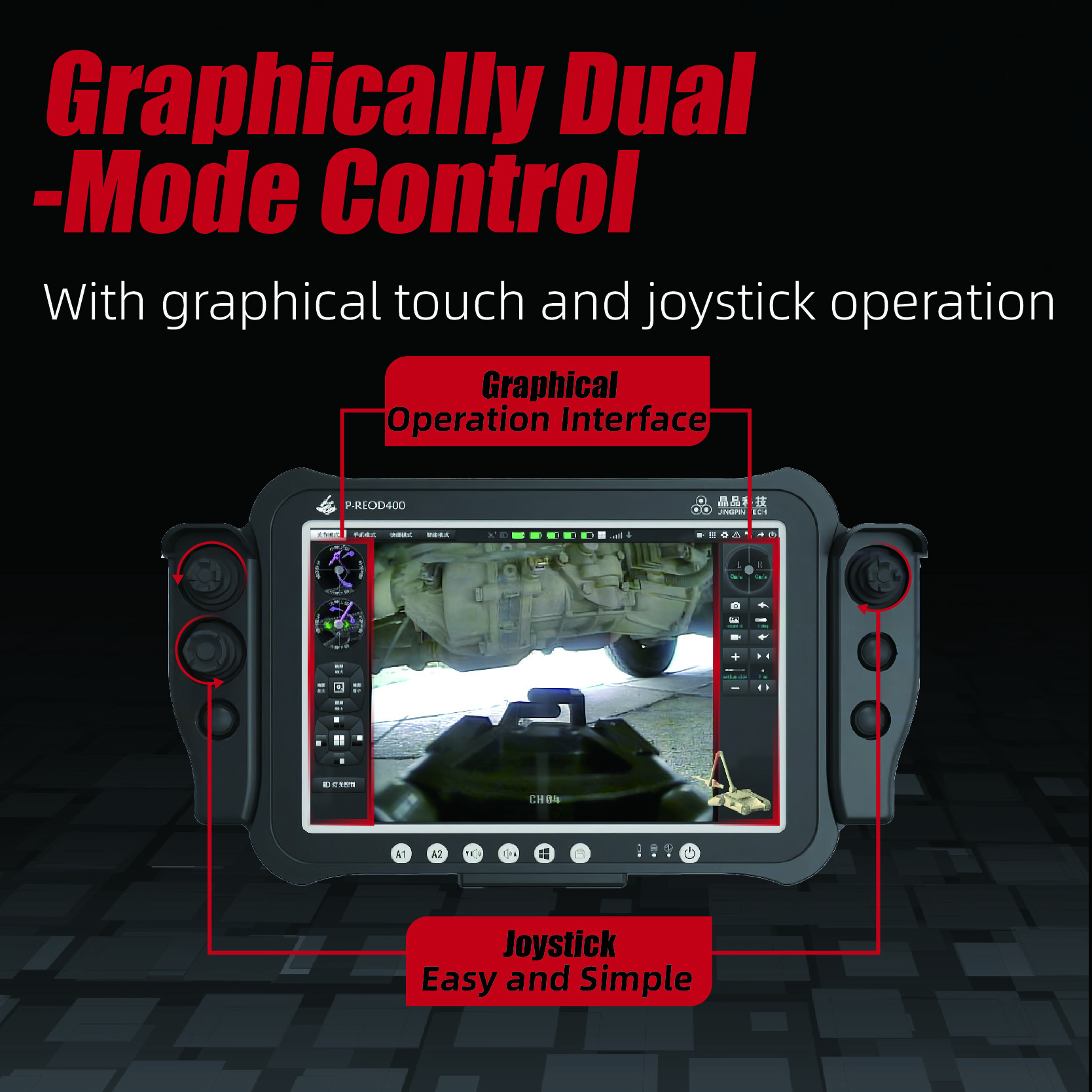
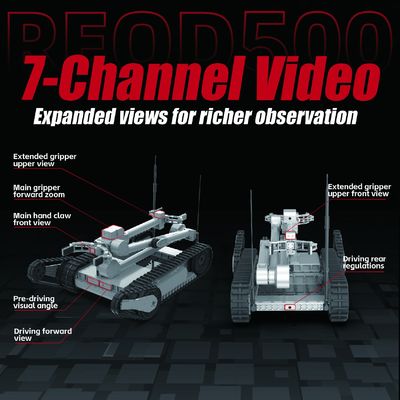
| Écran d'affichage du contrôleur | Disque LCD de 7 pouces | Affichage vidéo | 7 canaux, dont l'un a une fonction de zoom autofocus. |
| Méthode de fonctionnement | Fonctionnement en double mode du bouton et de l'écran tactile | Méthode de contrôle | Contrôle par câble ≥ 100 m ((cable standard),contrôle sans fil ≥ 1000 m ((extérieur) |
| Grade IP de la plateforme de robot | Résistance à la corrosion | Grade IP du bras | Résistance à la corrosion |
| Température de fonctionnement | -40°C+50°C | Température de stockage | -45°C+60°C |
| Mettre en évidence | Robot de destruction de munitions explosives à bras robotisé coordonné,Robot de destruction de munitions explosives moyennes,IP66 éod de robots |
||
Description de produit
Fabricants de robots de détection d'explosifs de taille moyenne
Description et caractéristiques
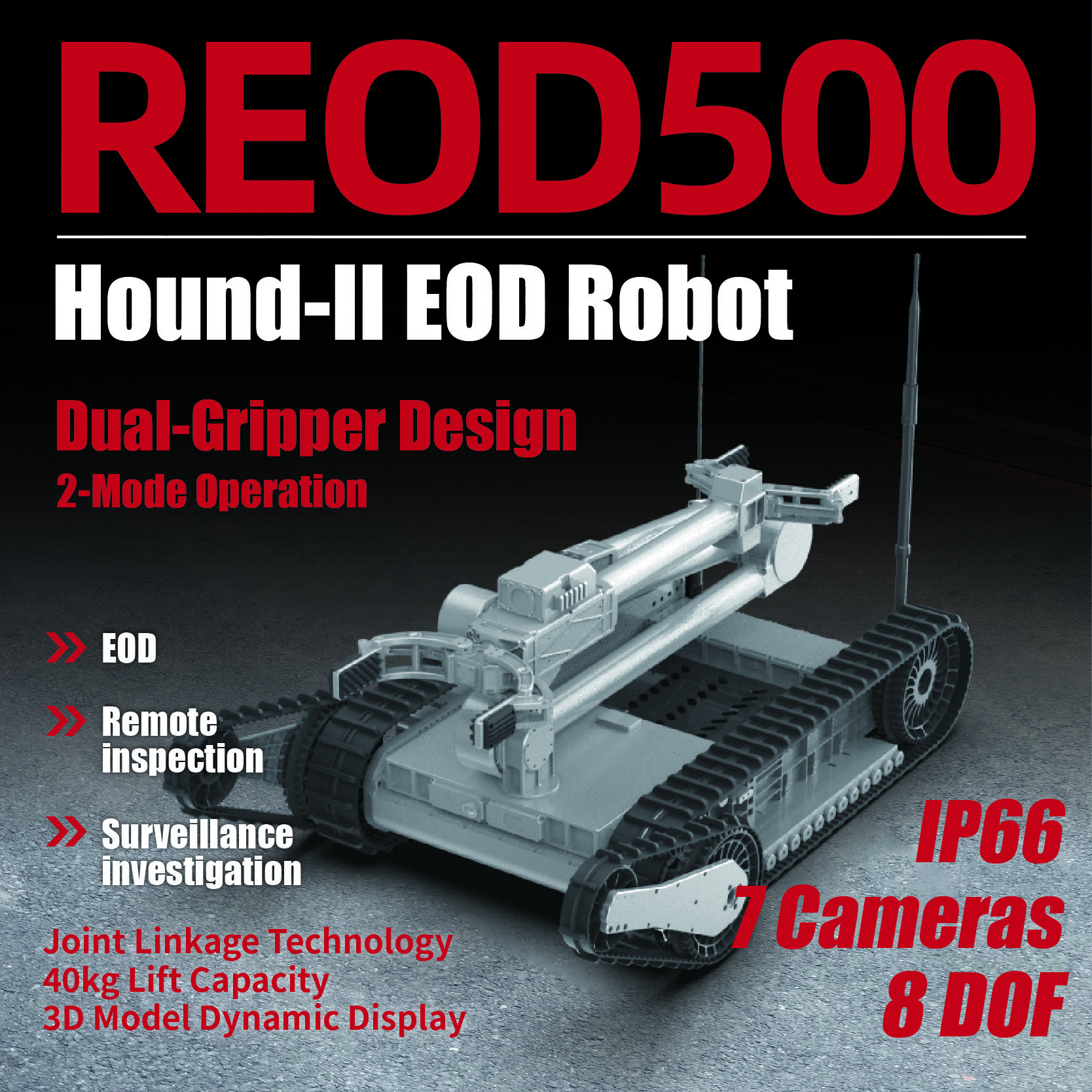
Le robot JP REOD500 EOD est une solution avancée pour l'élimination des munitions explosives (EOD) dans des environnements à haut risque.équipés d'un système de rampage à bras pivotant qui combine le rampage principal avec un mécanisme d'obstacle à bras pivotant, cette conception améliore considérablement les capacités de navigation des obstacles du robot, assurant des performances robustes et fiables dans les opérations d'EOD.Le robot est équipé d'un bras robotique à plusieurs degrés de liberté qui offre de puissantes capacités de saisie et de manipulation.. Le JP REOD500 a des dimensions ≤ 900 mm × 650 mm × 500 mm (entièrement rangé) et un poids ≤ 42 kg. Il a une vitesse maximale de ≥ 2,0 m/s, un dégagement d'obstacles ≥ 320 mm,d'une résistance à l'usure élevée et d'une résistance à l'usure élevée, assurant une maniabilité supérieure sur différents terrains.
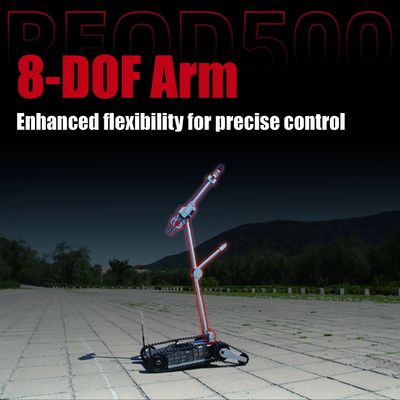
Équipé d'un manipulateur à 8 degrés de liberté, le JP REOD500 offre un contrôle précis avec une hauteur de saisie maximale de ≥ 1800 mm (garre principale) et une distance de saisie la plus éloignée de ≥ 1400 mm (garre principale).Le robot prend en charge un écran vidéo à 7 canaux, permettant des perspectives d'observation plus riches, et possède des capacités d'affichage en temps réel de la posture 3D à distance.une résistance à la poussière et à l'eau de type IP67, et des méthodes de contrôle comprenant la commande par câble jusqu'à 120 m et la commande sans fil jusqu'à 1200 m, le JP REOD500 est conçu pour la fiabilité et la polyvalence dans des conditions difficiles.Il offre des options de personnalisation OEM et ODM pour répondre à des besoins opérationnels spécifiques.
Amélioration de la conception du bras mécanique
Le JP REOD500 est doté d'une conception améliorée du bras mécanique qui améliore considérablement ses capacités de saisie.Cette conception avancée permet au robot de manipuler une variété d'objets dangereux avec une plus grande précision et résistance., améliorant l'efficacité globale des opérations de DEA.
Une conception innovante de brevet "à deux griffes"
La conception brevetée "deux griffes" permet au JP REOD500 de résoudre plusieurs tâches simultanément.comme saisir des objets en ouvrant des portes ou en effectuant d'autres tâches auxiliaires, ce qui le rend très efficace pour les missions de DEA.
Opération en double mode graphique Expérience d'exploitation pratique et fiable
L'opération graphique en double mode offre aux utilisateurs une interface intuitive pour contrôler le robot.assurer la facilité d'utilisation et la fiabilité dans les environnements à fort stressCette conception élimine le besoin pour les utilisateurs de mémoriser des fonctions de boutons complexes, réduisant ainsi le temps de formation et améliorant l'efficacité opérationnelle.
Affichage à distance en temps réel en 3D
Le JP REOD500 utilise une technologie d'affichage virtuel 3D avancée pour une rétroaction en temps réel de l'état du robot.fournir une compréhension intuitive et détaillée du positionnement et de l'environnement du robot, même lorsqu'il fonctionne au-delà de la ligne de vue.
Conception de contrôle préréglé intelligent réglage personnalisé de la posture de travail
La conception intelligente de commande "pré-réglée" permet au JP REOD500 d'atteindre automatiquement les positions prédéfinies en un clic, en fonction des besoins de l'utilisateur.réduire la quantité d'intervention manuelle requise et assurer une exécution rapide et fiable des tâches.
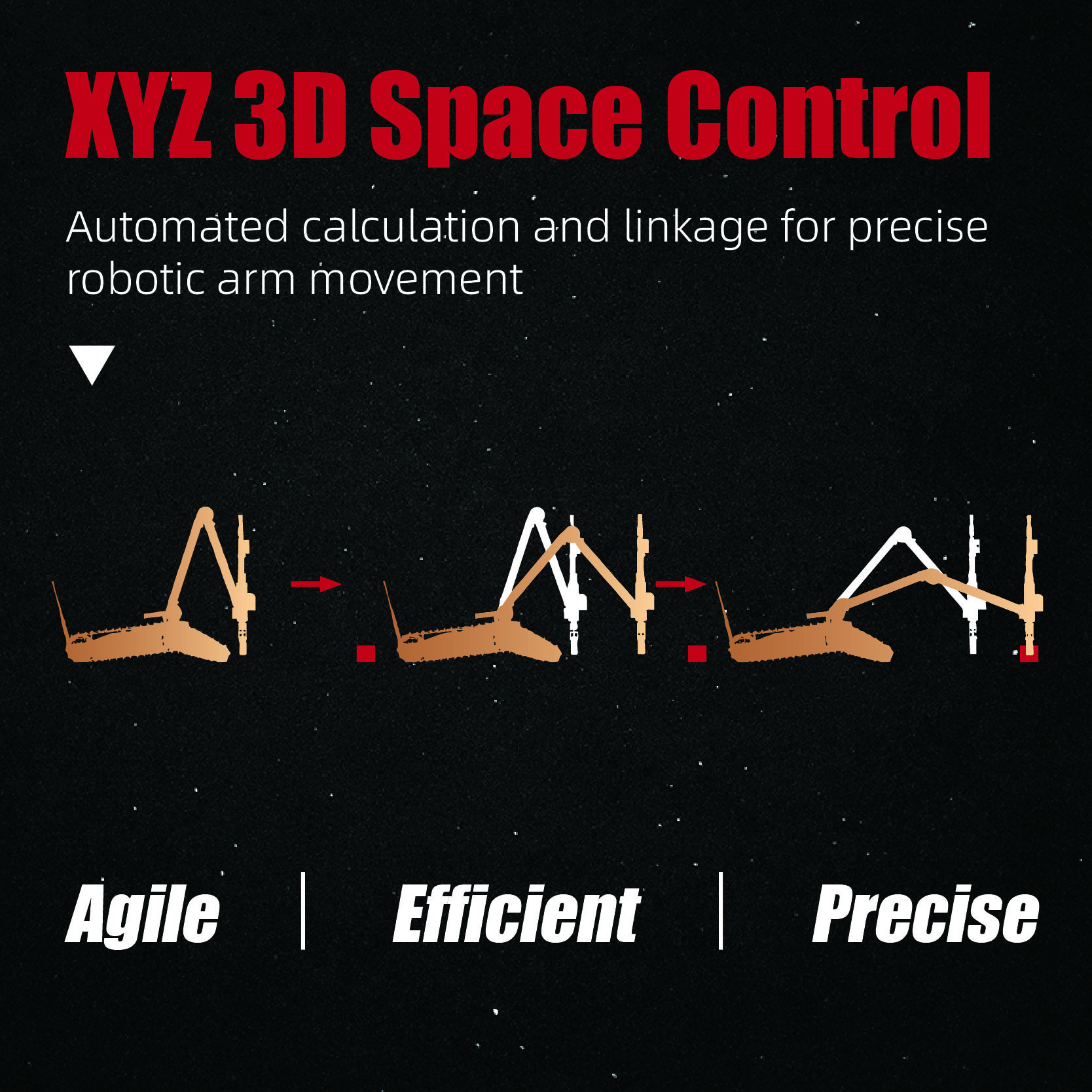
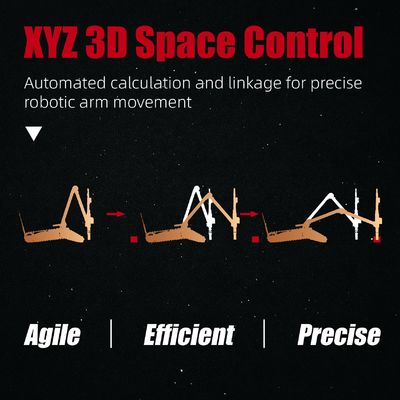
"X-Y-Z" espace tridimensionnel conception de liaison de bras robotiques
Le JP REOD500 utilise une conception tridimensionnelle de liaison de bras robotiques "X-Y-Z" basée sur un calcul automatique, fournissant un contrôle précis des mouvements du robot.Cette conception améliore l'efficacité et la précision des tâches d'élimination des bombes, réduisant le temps de fonctionnement moyen jusqu'à 80% par rapport à la commande traditionnelle à un seul joint.
Système vidéo à 7 canaux Perspectives d'observation plus riches
Équipé d'un système vidéo à 7 canaux, le JP REOD500 offre de multiples angles d'observation pour améliorer la connaissance de la situation.le mode d'accrochage principal, et le mode d'accrochage auxiliaire, adapté au contexte opérationnel pour une visibilité optimale.
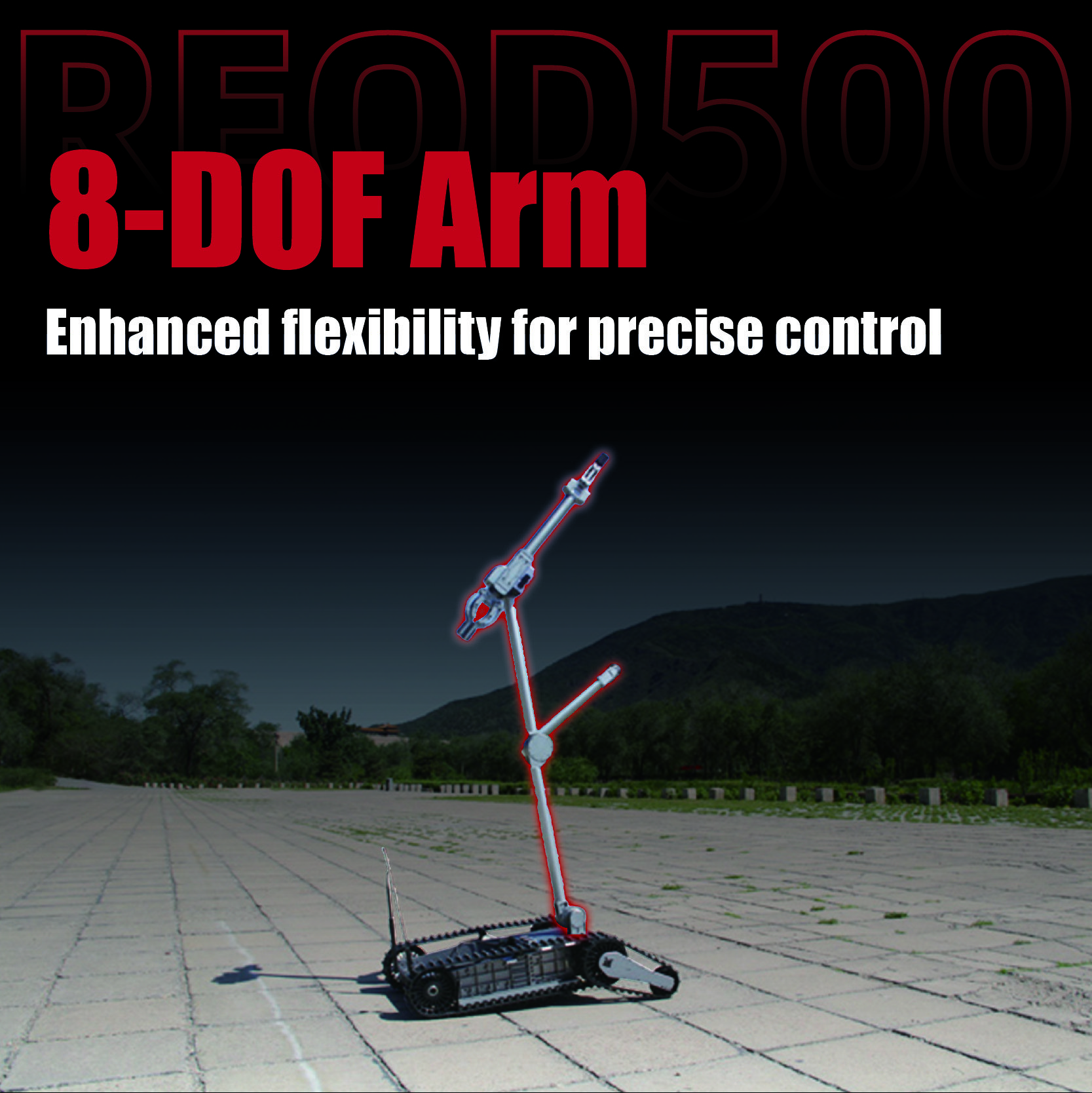
Conception d'un bras robotisé à 8 degrés de liberté
La conception du bras robotisé à 8 degrés de liberté donne au JP REOD500 de fortes capacités de portée spatiale, lui permettant d'effectuer des tâches dans des environnements élevés, bas, profonds ou sur une table.Cette souplesse le rend adapté à un large éventail d'opérations de DDE qui nécessitent une précision et une adaptabilité.
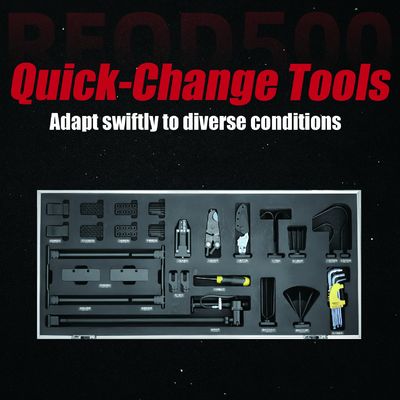
Système d'outils polyvalent à changement rapide
Le JP REOD500 est équipé d'un système d'outils polyvalent à changement rapide, comprenant plusieurs ensembles d'outils de saisie, des ensembles d'outils de base et des ensembles d'outils étendus.Ces outils peuvent être rapidement remplacés en fonction des exigences opérationnelles spécifiques, ce qui permet au robot de s'adapter sans heurts à diverses conditions de travail et de faire face efficacement à différents types de dangers.
Applications
Galerie d'image
Paramètres techniques
| Plateforme robotisée | |
|
Taille |
≤ 950×650×650 mm ((Totellement rangé) |
|
Le poids |
≤ 50 kg ((Contient deux ensembles de piles) |
|
Vitesse maximale |
Le système de freinage doit être équipé d'un dispositif de freinage de freinage de type V. |
|
La capacité à surmonter les obstacles |
≥ 400 mm |
|
Largeur de la rainure |
≥ 400 mm |
|
Gradibilité |
≥ 45° |
|
Montez les escaliers |
≥ 45° |
|
Profondeur de mise en place |
≥ 200 mm |
|
Durée de vie de la batterie (température normale) |
≥ 3 heures |
|
Performance de saisie du bras robotisé |
|
|
Longueur du bras |
2 000 mm |
|
Poids maximal de l'enlèvement |
≥ 40 kg |
|
Les griffes |
2 |
|
Les articulations mobiles |
8 |
|
Contrôleur portable |
|
|
Taille |
≤ 270 mm × 170 mm × 100 mm |
|
Le poids |
≤ 1,2 kg ((sans sac à dos) |
|
Écran d'affichage |
Disque LCD de 7 pouces |
|
Affichage vidéo |
7 canaux, dont l'un a une fonction de zoom autofocus. |
|
Méthode de fonctionnement |
Fonctionnement en double mode de l'appareil à bascule et de l'écran tactile |
|
Méthode de contrôle |
Contrôle par câble ≥ 100 m ((cable standard),contrôle sans fil ≥ 1000 m ((extérieur) |
|
Niveau de protection et adaptabilité à l'environnement |
|
|
Plateforme robotisée |
Résistance à la corrosion |
|
Le bras |
Résistance à la corrosion |
|
Température de fonctionnement |
-40°C ≈ +50°C |
|
Température de stockage |
-45°C ≈ +60°C |
Nous contacter
Mlle Amy
E-mail:Je vous en prie.
produits recommandés